
Sim-to-Real Transfer: Bridging the Reality Gap
Published:
The Reality Gap
Modern physics simulators (MuJoCo, Isaac Gym, PyBullet) enable massively parallel training of robot policies at virtually zero cost and with no hardware risk. A policy can experience millions of episodes in hours of simulation time that would take months on real hardware.
The catch is the reality gap: simulators approximate the real world, and these approximations matter. Friction coefficients, motor backlash, sensor noise, contact dynamics, and rendering artifacts all differ between simulation and reality. A policy that exploits simulator quirks — a common outcome of deep RL — will fail catastrophically when those quirks disappear.
Domain Randomisation
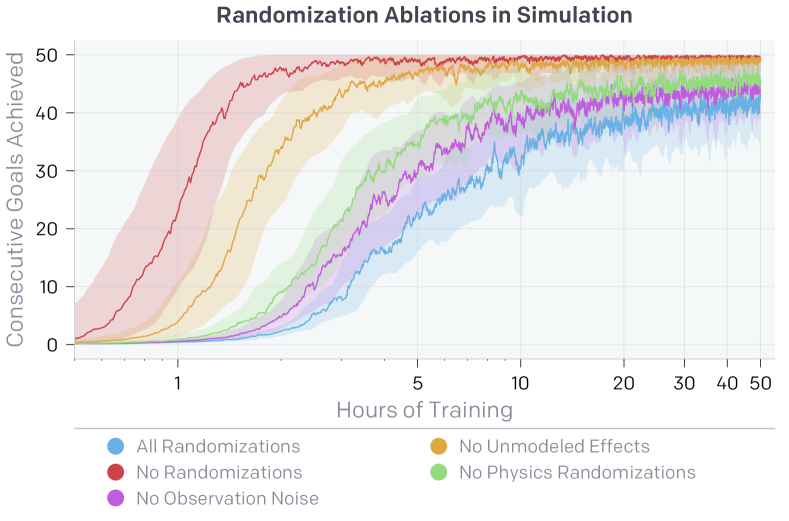
Domain randomisation (Tobin et al. 2017) addresses the reality gap by training policies across a wide distribution of simulated environments with randomised physical parameters. If the real world is just another sample from this distribution — or close to it — the policy must be robust enough to handle it.
Parameters commonly randomised include:
- Dynamics: friction, mass, inertia, joint damping, actuator gains
- Perception: lighting, object textures, camera pose, sensor noise
- Delays: action latency, observation delays
where \(\xi\) denotes the randomised environment parameters sampled from a prior distribution \(P(\Xi)\). The resulting policy must succeed across all sampled environments, pushing it toward strategies that are inherently robust rather than finely tuned to one simulator’s behaviour.
OpenAI Dactyl
The most striking demonstration of sim-to-real transfer is OpenAI Dactyl (Andrychowicz et al. 2019, arXiv:1808.00177). Dactyl trained a Shadow Dexterous Hand to manipulate a Rubik’s Cube using only simulated experience with massive domain randomisation, then deployed the learned policy on the real robotic hand zero-shot.
Key design choices included:
- Randomising over 100 physical parameters per training episode
- Using asymmetric actor-critic: the critic sees privileged simulation state; the actor sees only realistic observations
- LSTM-based policy to implicitly adapt to the current environment instance
- Automatic Domain Randomisation (ADR), which progressively expands the randomisation range as the policy improves
The result: a policy that had never touched real hardware successfully solved in-hand manipulation tasks that previously required years of specialised robotics engineering.
Domain Adaptation
An alternative to randomisation is domain adaptation: explicitly aligning the simulation and real domains using data from both. Approaches include:
- Feature-level adaptation: train a domain-agnostic encoder such that simulation and real observations map to the same feature space (via adversarial training or maximum mean discrepancy).
- Image-to-image translation: use CycleGAN or similar to translate simulated images to realistic ones before passing to a policy trained on realistic images.
- Pixel randomisation: replace simulated textures with random natural images at training time (randomised-to-canonical adaptation).
System Identification
System identification (SysID) takes the complementary approach: instead of randomising over parameters, measure the real system’s parameters precisely and build a high-fidelity simulation that closely matches reality. SysID methods fit simulation parameters to minimise the discrepancy between simulated and real trajectories under identical inputs. The challenge is that some real-world phenomena (cable routing, long-range contact, fluid dynamics) resist compact parameterisation.
Modern approaches combine SysID with residual models: a physics simulation captures coarse dynamics, and a learned residual corrects remaining errors.
References
- Andrychowicz, M., et al. (2019). Learning dexterous in-hand manipulation. IJRR, 39(1), 3–20. arXiv:1808.00177.
- Tobin, J., et al. (2017). Domain randomisation for transferring deep neural networks from simulation to the real world. IROS 2017.
- Peng, X. B., et al. (2018). Sim-to-real transfer of robotic control with dynamics randomisation. ICRA 2018.
- Bousmalis, K., et al. (2018). Using simulation and domain adaptation to improve efficiency of deep robotic grasping. ICRA 2018.
- Ramos, F., et al. (2019). BayesSim: Adaptive domain randomisation via probabilistic inference for robotics simulators. RSS 2019.