
Equivariant Sheaf Neural Networks
Published:
From Sheaves to Connections
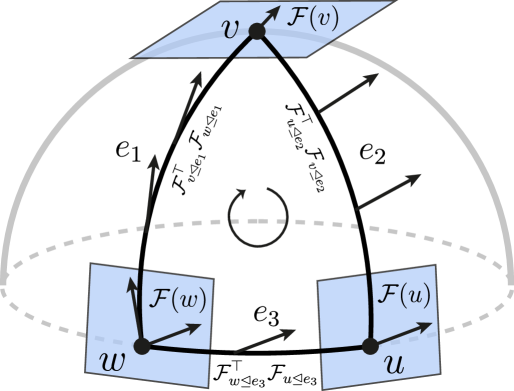
Intuition First: Imagine each node in the graph is a city with its own local coordinate system — north means something slightly different in New York than in Tokyo because Earth is curved. To compare directions between cities, you need to transport a vector along the path between them, accounting for the curvature. That transport rule is the “connection.” In a sheaf with orthogonal maps, the edge maps are exactly this parallel transport — they tell you how to rotate a vector from node u’s local frame to node v’s local frame. The “curvature” is detected when you go around a cycle and the transported vector has rotated from where you started.
A cellular sheaf with orthogonal restriction maps O_{u→e} ∈ O(d) defines a principal O(d)-bundle on the graph — each node has a “local coordinate frame,” and the edge maps specify how to transform vectors from u’s frame to the edge’s frame (and from there to v’s frame).
The holonomy around a cycle in the graph is the composition of edge maps along the cycle. If the sheaf is flat (holonomy = identity around all cycles), global sections exist and the sheaf is consistent. Non-trivial holonomy indicates global geometric structure — like parallel transport on a curved manifold.
The Connection Laplacian
With orthogonal maps O_{u→e} and O_{v→e}, the Sheaf Laplacian has a special form called the Connection Laplacian:
The off-diagonal block -O^T_{u→e} O_{v→e} = -O_{u←e} O_{v→e} is itself an orthogonal matrix (product of orthogonals). It represents the parallel transport map from v’s frame to u’s frame via edge e.
Key property: the Connection Laplacian is positive semi-definite with eigenvalues in [0, 2d]. Its null space consists of parallel sections — vector fields that are “constant” under parallel transport.
Gauge Symmetry
A gauge transformation at node v is a local change of coordinate frame — applying an orthogonal transformation g_v ∈ O(d) to all features at v. Under this transformation:
- Node features: x_v → g_v x_v
- Restriction maps: O_{v→e} → O_{v→e} g_v^{-1} (compensate to keep edge consistency)
- Sheaf Laplacian: L_C → (block-diag g) L_C (block-diag g)^{-1}
The gauge-invariant quantities are independent of the choice of local frame:
- Edge holonomies (parallel transport around cycles)
- Eigenvalues of L_C
Norms O_{u→e} x_u - O_{v→e} x_v
A truly equivariant sheaf GNN should produce outputs that are gauge-invariant (for graph-level tasks) or gauge-equivariant (for node-level tasks).
Equivariant Sheaf GNN Layers
A gauge-equivariant layer must use only gauge-invariant quantities when computing messages:
Gauge-invariant quantities at edge (u,v):
x_u , x_v (norms) - x_u^T O_{u→e}^T O_{v→e} x_v (inner product after transport)
O_{u→e} x_u - O_{v→e} x_v ² (disagreement = Sheaf Dirichlet energy at this edge)
Gauge-equivariant output:
- O_{v→e} x_v (transported feature) — transforms as g_v x_v under gauge transformation at v
- O_{u→e}^T O_{v→e} x_v (v’s feature in u’s frame) — gauge-equivariant at u
A complete equivariant sheaf layer:
Where φ is any function (can be an MLP). The input is gauge-equivariant at v, so the output is gauge-equivariant.
Connection to Equivariant GNNs for 3D Data
The geometric deep learning framework (EGNN, SE(3)-Transformers, TFN) handles E(n)/SE(3) equivariance for 3D point clouds. Sheaf GNNs with O(d) restriction maps handle O(d) gauge equivariance on abstract graphs.
The mathematical structures are parallel:
- 3D equivariant GNNs: equivariant under the rotation group SO(3) acting globally
- Sheaf GNNs: equivariant under gauge group O(d) acting locally (different transformation at each node)
Sheaf gauge equivariance is strictly stronger than global equivariance — it requires equivariance under independent transformations at each node, not just a single global rotation.
Applications
Point clouds with local frames: each point has a local coordinate frame (e.g., surface normal + tangent plane). Sheaf GNNs with orthogonal maps can process features in local frames and aggregate them correctly — analogous to gauge-equivariant neural networks on meshes.
Protein structure: each residue has a local frame (N-Cα-C backbone). The sheaf maps encode how to transform between residue frames along peptide bonds.
Graph signal processing: the Connection Laplacian generalises the standard graph Laplacian to vector-valued signals with local frame structure.
Summary
| Concept | Sheaf language | Geometry language |
|---|---|---|
| Orthogonal restriction maps | O_{u→e} ∈ O(d) | Parallel transport maps |
| Sheaf Laplacian (orthogonal case) | Δ_F with O(d) maps | Connection Laplacian L_C |
| Global sections | ker(δ₀) | Parallel sections |
| Holonomy | Product of maps around cycle | Curvature of connection |
| Gauge transformation | Local O(d) at each node | Change of local frame |
Equivariant sheaf GNNs sit at the intersection of algebraic topology, differential geometry, and graph learning — providing a principled framework for processing data with local frame structure on graphs.
References
- Bodnar, C., Giovanni, F. D., Chamberlain, B. P., Liò, P., & Bronstein, M. M. (2022). Neural Sheaf Diffusion: A Topological Perspective on Heterophily and Oversmoothing in GNNs. NeurIPS 2022 (NSD: introduces orthogonal restriction maps and their connection to O(d) gauge symmetry on graphs).
- Singer, A. (2011). Angular Synchronization by Eigenvectors and Semidefinite Programming. Applied and Computational Harmonic Analysis 2011 (connection Laplacian for angular synchronisation — foundational work showing the link between sheaf Laplacians and gauge fields on graphs).
- de Lara, N., & Pineau, E. (2018). A Simple Baseline Algorithm for Graph Classification. arXiv 2018 (theoretical treatment of the connection Laplacian as the gauge-equivariant analogue of the graph Laplacian, motivating orthogonal sheaf maps).